Anwendungsbereiche
 Tinnitus ist definiert als die subjektive Wahrnehmung eines Geräuschs bei Fehlen einer äußeren Schallquelle. In Deutschland leiden ca. 10 Mio. Menschen unter einem Tinnitus, was zu Einschränkungen der Lebensqualität und Leistungsfähigkeit führt. Ein verlässlich wirksames Verfahren zur Behandlung des Tinnitus wäre damit von erheblicher medizinischer sowie sozioökonomischer Bedeutung.
Tinnitus ist definiert als die subjektive Wahrnehmung eines Geräuschs bei Fehlen einer äußeren Schallquelle. In Deutschland leiden ca. 10 Mio. Menschen unter einem Tinnitus, was zu Einschränkungen der Lebensqualität und Leistungsfähigkeit führt. Ein verlässlich wirksames Verfahren zur Behandlung des Tinnitus wäre damit von erheblicher medizinischer sowie sozioökonomischer Bedeutung.Die Auswirkungen einer elektrischen Stimulation auf den Tinnitus im Rahmen der Cochleaimplantat-(CI)-Versorgung von hochgradig schwerhörigen Patienten sind dagegen in zahlreichen Studien untersucht worden. Davon abgeleitet ist die thematische Zielstellung der Entwicklung eines speziellen extracochleären Implantats für Tinnitus-Patienten überaus relevant – unabhängig von der individuellen Hörsituation. Jedoch ist die klinische Umsetzung bislang an der Entwicklung klinisch anwendbarer Systeme zur dauerhaften Elektrostimulation gescheitert: Hier könnten die im Zuge des Innovationsclusters INTAKT zu erstellenden Implantate neue Möglichkeiten eröffnen.
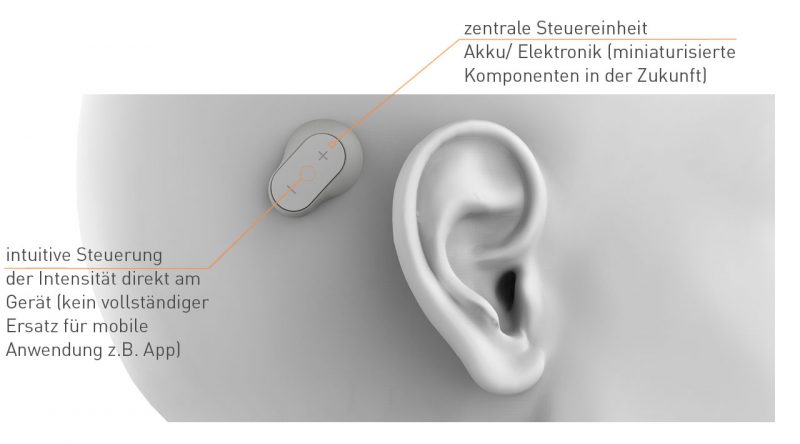
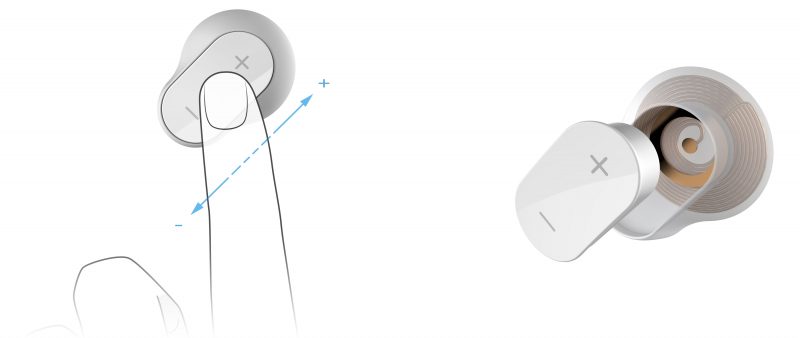
Die technischen Möglichkeiten der Miniaturisierung ermöglichen heute neue Wege der Übertragung der Elektrostimulation. Das Ziel des Projektes INTAKT ist die Entwicklung, Fertigung, Charakterisierung und präklinische Evaluierung einer neuen Generation von aktiven, vernetzten Implantaten. Die Signalübertragung erfolgt telemetrisch über ein Spulenelement. Die Steuerung der Stimulation ist physiologisch abgestimmt und mittels einer externen zentralen Steuereinheit adaptiert.
Ein im Mittelohr positioniertes Implantat stimuliert den Hörnerv durch das Runde Fenster ohne die Strukturen des Innenohres zu berühren. Physiologisch soll der Effekt auf den Tinnitus durch eine Synchronisierung der afferenten Signale der Cochlea sowie die Unterstützung der zentralen Neuromodulation durch Modifikation der afferenten Signale erzielt werden. Die individuell angepasste Stimulation führt zu einer individualisierten und bedarfsgerechten Suppression des Tinnitus.
Mit dem im Projekt INTAKT zu entwickelnden System wird erstmals die Möglichkeit hergestellt eine einfach zu implantierende Einheit zu schaffen, die eine lokale und individuell angepasst eine Suppression des Tinnitus insbesondere bei hörenden Patienten bewirken kann.
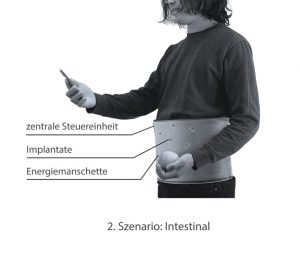
Überbrückung und Therapie gastrointestinaler Motilitätsstörungen mittels intelligent vernetzter, kabelloser INTAKT-Mikroimplantate
 Schädigungen der Wand oder der Nerven im Verdauungstrakt führen zu Funktionsstörungen der unwillkürlich (autonom) gesteuerten Bewegungsmuster und damit zu Beschwerden und Erkrankungen. Solche sogenannten schweren Motilitätsstörungen können nach bauchchirurgischen Eingriffen, bei Querschnittslähmung, als Folge von anderen Erkrankungen wie beispielsweise Diabetes mellitus und Parkinson sowie als Nebenwirkung von bestimmten Medikamenten auftreten.
Schädigungen der Wand oder der Nerven im Verdauungstrakt führen zu Funktionsstörungen der unwillkürlich (autonom) gesteuerten Bewegungsmuster und damit zu Beschwerden und Erkrankungen. Solche sogenannten schweren Motilitätsstörungen können nach bauchchirurgischen Eingriffen, bei Querschnittslähmung, als Folge von anderen Erkrankungen wie beispielsweise Diabetes mellitus und Parkinson sowie als Nebenwirkung von bestimmten Medikamenten auftreten.
Wenn schon leichtere intestinale Motilitätsstörungen zu Völlegefühl, Sodbrennen, Übelkeit, Blähungen, Durchfall oder Verstopfung führen und damit äußerst unangenehm sind, schränken schwere Motilitätsstörungen, welche zu unkontrollierbaren Stuhlentleerungsstörungen, Harninkontinenz oder Lähmungen des Darmtraktes führen können, die Lebensqualität extrem ein und können lebensbedrohlich sein.
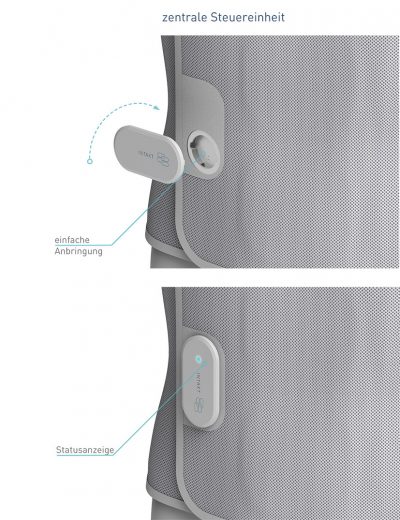
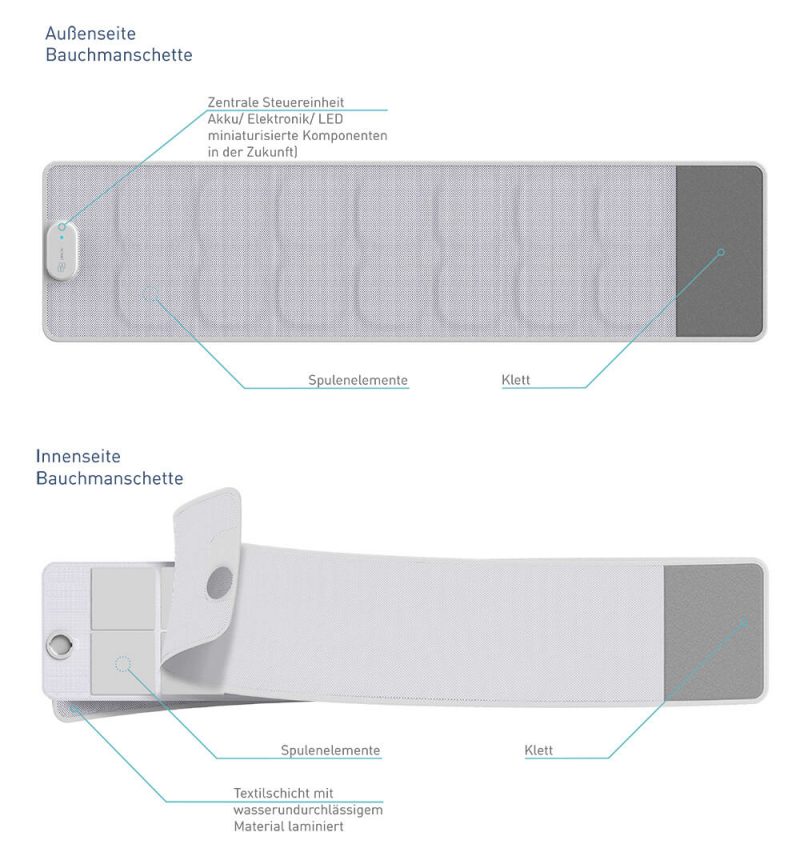
Im Rahmen des INTAKT-Projektes werden die Grundlagen für ein intelligent vernetztes Mikroimplantat-System geschaffen. Mehrere im Magen-Darm-Trakt verteilte Kleinimplantate sollen untereinander kommunizieren und die funktionellen Defizite und Störungen z.B. an der Speiseröhre, am Magens, am Dünn-, Dick- und Mastdarm, sowie am Anus überbrücken. Die Kleinimplantate erfassen die aktuelle intestinale Funktion über elektrisch abgeleitete Potentiale. Die Daten sollen per telemetrischer Kommunikation optisch oder per Funk an eine zentrale Steuereinheit gesendet werden. Diese analysiert und bewerten die Potentiale und veranlasst eine elektrische Stimulation an geeigneten Triggerpunkten. Dies führt im passenden Moment zu einer koordinierten Bewegungsänderung von Speiseröhre, Magen und Darm.
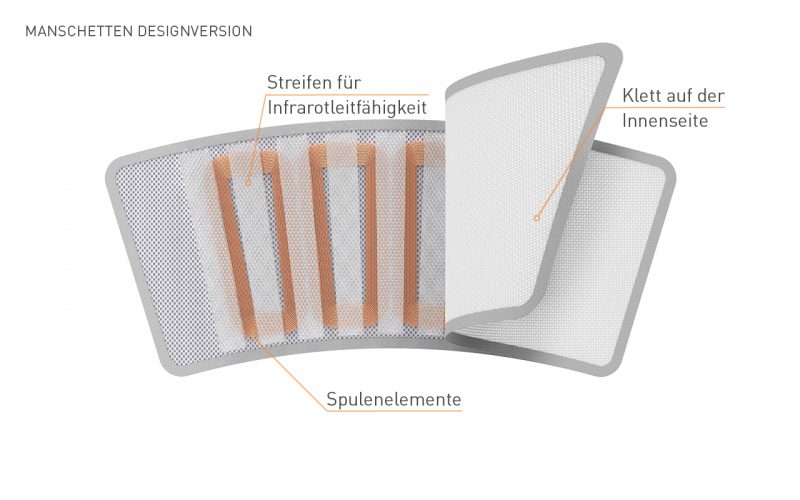
Die interaktive Ankopplung an eine externe übergeordnete Kontrolleinheit ist über ein Interface (Bauchmanschette mit integrierter Elektronik und Energieversorgung) gegeben. Die Energieversorgung ist induktiv, d. h. es gibt weder eine Kabelverbindungen von den Implantaten nach außen, noch untereinander. Die Energieübertragung erfolgt mittels Magnetfeld. Sollte die induktive Verbindung eines Mikrostimulators nach außen abbrechen, so können die Mikroimplantate einige Minuten autonom, abgepuffert durch einer Batteriezelle, weiterarbeiten.
Eine Tablet-Computerbasierte Bedienersoftware erlaubt es dem Arzt, komfortabel die initiale Konfiguration des Systems und im Besonderen der Stimulationsmuster vorzunehmen. Der Nutzer selbst soll möglichst wenige Einstellungen vornehmen müssen. Im Idealfall beschränken sich die Nutzereingaben auf die Kalibration des Systems zu Beginn der Tragezeit, durch die Eingabe der Wach- und Schlafphasen, sowie der Nahrungsaufnahme Zeiten.
Bei der Entwicklung implantierbarer medizinischer Geräte, von der ersten Idee bis zur sicheren und effektiven Anwendung bei Patienten, sind hohe Hürden zu überwinden. Auch die Entwicklung eines Designs und dessen technische Spezifikationen müssen dabei mit chirurgischen Implantationstechniken Hand in Hand gehen. Im INTAKT Projekt wurde ein Prototyp-Modelle eines theranostik (Therapie und Diagnostik) Implantates entwickelt und ein minimalinvasiver chirurgischer Ansatz für die Implantation des Modells am Magen-Darm Trakt überprüft.
Wiederherstellung der Greiffunktion mittels vernetzter INTAKT-Mikrostimulatoren
 Viele Schädigungen des zentralen Nervensystems, wie Querschnittlähmungen, Schlaganfälle oder Hirntumore, gehen mit Einschränkungen der Handfunktion einher. Die negativen Auswirkungen einer limitierten Greiffunktion auf die Bewältigung von Alltagsaufgaben sind offensichtlich. Besonders schwer trifft es Hoch-Querschnittgelähmte, da bei ihnen beide Hände betroffen sind. Von einer Sekunde auf die andere sind diese Menschen selbst bei einfachen Aufgaben ganztägig und lebenslang auf Hilfe durch Dritte angewiesen, was die Fähigkeit zu einem selbstbestimmten Leben massiv einschränkt.
Viele Schädigungen des zentralen Nervensystems, wie Querschnittlähmungen, Schlaganfälle oder Hirntumore, gehen mit Einschränkungen der Handfunktion einher. Die negativen Auswirkungen einer limitierten Greiffunktion auf die Bewältigung von Alltagsaufgaben sind offensichtlich. Besonders schwer trifft es Hoch-Querschnittgelähmte, da bei ihnen beide Hände betroffen sind. Von einer Sekunde auf die andere sind diese Menschen selbst bei einfachen Aufgaben ganztägig und lebenslang auf Hilfe durch Dritte angewiesen, was die Fähigkeit zu einem selbstbestimmten Leben massiv einschränkt.
Daher besteht ein wesentliches Ziel des INTAKT-Projekts in der Schaffung der Grundlagen zur Wiederherstellung der Bewegungsfunktion der Hand nach zentralen Lähmungen. Erreicht werden soll dies durch eine vernetzte elektrische Stimulation von 7-12 Muskeln des Unterarms und der Hand über die INTAKT-Mikroimplantate. Damit können neben einem Schlüssel- und Zylindergriff auch noch andere Griffformen wie ein Haken- oder ein Zeigegriff erzeugt werden. Die Auswahl bzw. Steuerung einer bestimmten Handbewegung erfolgt über ein Eye Tracking-System durch eine klare Zuordnung von erfassten Augen-, Lid- und Kopfbewegungen zu definiertem elektrischen Stimulationsmuster. Damit kann ein Nutzer das System interaktiv und ohne fremde Hilfe selbstständig steuern (s. Abb).
 Notfallroutinen zur schnellen Handöffnung oder zum Abschalten der Stimulation sind vorgesehen. Neben der Steuerung über das Eye Tracking-System können – wo vorhanden – noch intakten Muskelgruppen für eine intuitivere Kontrolle mit einbezogen werden. Hierfür können die noch vorhandenen elektrischen Muskelaktivitäten (Elektromyogramm, EMG) von den INTAKT-Implantaten registriert und an eine zentrale Steuereinheit gesendet werden. Die Bewertung der gewonnenen Signale resultiert aus internen patientenspezifischen Routinen und ist angelehnt an Datenfilterprinzipien des Kleinhirns.
Notfallroutinen zur schnellen Handöffnung oder zum Abschalten der Stimulation sind vorgesehen. Neben der Steuerung über das Eye Tracking-System können – wo vorhanden – noch intakten Muskelgruppen für eine intuitivere Kontrolle mit einbezogen werden. Hierfür können die noch vorhandenen elektrischen Muskelaktivitäten (Elektromyogramm, EMG) von den INTAKT-Implantaten registriert und an eine zentrale Steuereinheit gesendet werden. Die Bewertung der gewonnenen Signale resultiert aus internen patientenspezifischen Routinen und ist angelehnt an Datenfilterprinzipien des Kleinhirns.
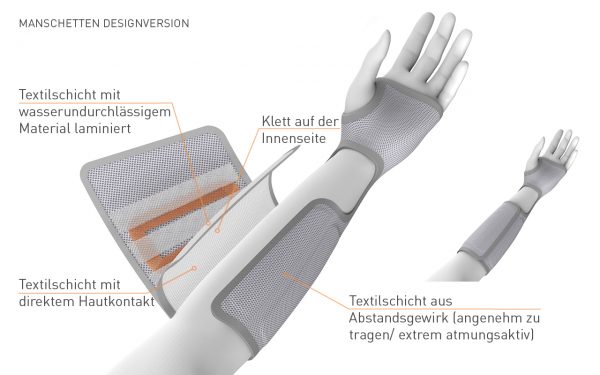
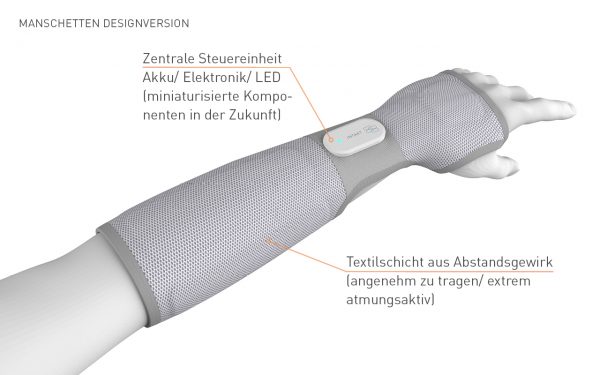 Die telemetrische Kommunikation zwischen den Implantaten und einer zentralen Steuereinheit wird optisch oder per Funk ermöglicht. Die interaktive Ankopplung an eine externe übergeordnete Kontrolleinheit ist über ein Interface (Manschette mit integrierter Elektronik und Energieversorgung) gegeben. Die Energieversorgung ist induktiv, d. h. es gibt keine Kabelverbindungen von den Implantaten nach außen als auch zueinander, sondern erfolgt mittels Magnetfeld. Sollte die induktive Verbindung eines Mikrostimulators nach außen abbrechen, so können die Mikroimplantate einige Minuten autonom weiterarbeiten, so dass ein ergriffener Gegenstand nicht sofort aus der Hand fällt und sicher abgestellt werden kann.
Die telemetrische Kommunikation zwischen den Implantaten und einer zentralen Steuereinheit wird optisch oder per Funk ermöglicht. Die interaktive Ankopplung an eine externe übergeordnete Kontrolleinheit ist über ein Interface (Manschette mit integrierter Elektronik und Energieversorgung) gegeben. Die Energieversorgung ist induktiv, d. h. es gibt keine Kabelverbindungen von den Implantaten nach außen als auch zueinander, sondern erfolgt mittels Magnetfeld. Sollte die induktive Verbindung eines Mikrostimulators nach außen abbrechen, so können die Mikroimplantate einige Minuten autonom weiterarbeiten, so dass ein ergriffener Gegenstand nicht sofort aus der Hand fällt und sicher abgestellt werden kann.
Eine tabletcomputerbasierte Bedienersoftware erlaubt es dem Arzt, komfortabel die initiale Konfiguration des Systems und im Besonderen der Stimulationsmuster vorzunehmen. Der Nutzer selbst soll möglichst wenig Einstellungen vornehmen müssen. Im Idealfall beschränken sich die Nutzereingaben auf die Kalibration des Eye Trackers.
Am 19.06.2019 war eine Delegation des INTAKT Konsortiums beim Bundesministerium für Bildung und Forschung (BMBF) in Berlin um für eine Zwischenevaluierung zur Halbzeit des Projektes die bisherigen Projektergebnisse vorzustellen. Die Delegation stellte sich den tiefgründigen Fragen der Gutachtern und Vertretern des BMBF. Das Ergebnis der Zwischenevaluierung wird in wenigen Monaten veröffentlicht.

v.l. Kai Diercks (soventec), Roman Ruff (Fraunhofer IBMT), Dr. Thilo Krüger (inomed), Wiebke Droste (Universität Mannheim), PD Dr. Rüdiger Rupp (Universitätsklinikum Heidelberg), Frau Prof. Dr. med. Heidi Olze (Charité), Dr. Alina Schreivogel (Würth Elektronik), Dana Puhe (WILDDESIGN), Prof. Dr. med. Werner Kneist (Universitätsmedizin Mainz) Prof. Dr. Klaus-Peter Hoffmann (Fraunhofer IBMT)